
前言
开发游戏AI的目标之一就是要找到一个简单,可扩展的编辑逻辑的方案,从而加速游戏开发的迭代速度。在“行为系统图”中,行为系统(Behavior System)响应游戏中的各种信息,进行决策以挑选接下来将要执行的行动并且监控该行动的执行。
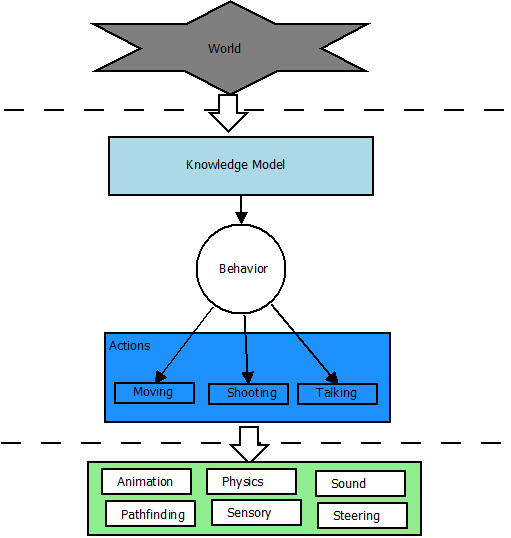
知识模型(Knowledge Model)是对游戏世界中各种信息的抽象。
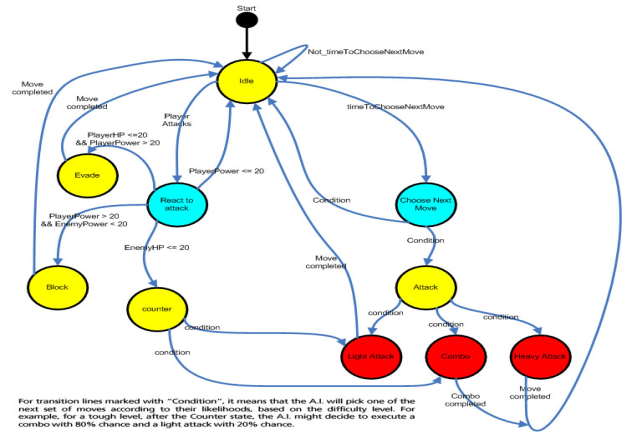
在行为系统中,有限状态机(FSM,Finite State Machine)最为经典,FSM模型的优势之一是简单。但是FSMs需要用转换(Transition)连接状态(State),因此,状态(State)失去了模块性(Modularity)。
什么是行为树
行为树,英文是Behavior Tree,简称BT,是由行为节点组成的树状结构:
对于FSM,每个节点表示一个状态,而对于BT,每个节点表示一个行为。同样是由节点连接而成,BT有什么优势呢?
在BT中,节点是有层次(Hierarchical)的,子节点由其父节点来控制。每个节点的执行都有一个结果(成功Success,失败Failure或运行Running),该节点的执行结果都由其父节点来管理,从而决定接下来做什么,父节点的类型决定了不同的控制类型。节点不需要维护向其他节点的转换,节点的模块性(Modularity)被大大增强了。实际上,在BT里,由于节点不再有转换,它们不再是状态(State),而是行为(Behavior)。
由此可见,BT的主要优势之一就是其更好的封装性和模块性,让游戏逻辑更直观,开发者不会被那些复杂的连线绕晕。
一个例子
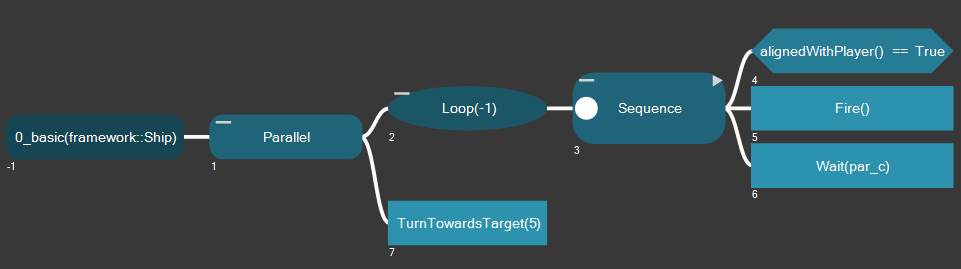
上图中,3号Sequence节点有3个子节点,分别是:
– 4号Condition节点
– 5号Action节点
– 6号Wait节点
而3号节点的父节点是2号的Loop节点。
先补充下各节点类型的执行逻辑(详见节点说明):
- 序列(Sequence)节点:顺序执行所有子节点返回成功,如果某个子节点失败返回失败。
- 循环(Loop)节点:循环执行子节点到指定次数后返回成功,如果循环次数为-1,则无限循环。
- 条件(Condition)节点:根据条件的比较结果,返回成功或失败。
- 动作(Action)节点:根据动作结果返回成功,失败,或运行。
- 等待(Wait)节点:当指定的时间过去后返回成功。
执行说明
- 如果4号条件节点的执行结果是成功,其父节点3号节点则继续执行5号节点,如果5号动作节点返回成功,则执行6号等待节点,如果6号节点返回成功,则3号节点全部执行完毕且会返回成功,那么2号节点继续下个迭代。
- 如果4号条件节点的执行结果是失败,其父节点3号节点则返回失败不再继续执行子节点,并且2号节点继续下个迭代。
进阶
聪明的读者可能会问,上面的例子中只讲了成功或失败的情况,但如果动作要持续一段时间呢?如果5号节点,Fire需要持续一段时间呢?
- 节点的执行结果可以是“成功”,“失败”,或“运行”。
- 对于持续运行一段时间的Fire动作,其执行结果持续返回“运行”,结束的时候返回“成功”。
- 对于持续运行一段时间的Wait动作,其执行结果持续返回“运行”,当等待时间到达的时候返回“成功”。
当节点持续返回“运行”的时候,BT树的内部“知道”该节点是在持续“运行”的,从而在后续的执行过程中“直接”继续执行该节点,而不需要从头开始执行,直到该运行状态的节点返回“成功”或“失败”,从而继续后续的节点。从外面看,就像“阻塞”在了那个“运行”的节点上,其父节点就像不再管理,要一直等运行的子节点结束的时候,其父节点才再次接管
(请注意,这一段说明只是从概念上这样讲,概念上可以这样理解,实际上即使运行状态的节点每次执行也是要返回的,只是其返回值是运行,其父节点对于返回值是运行状态的节点,将使其继续,所以看上去好像父节点不再管理。)。
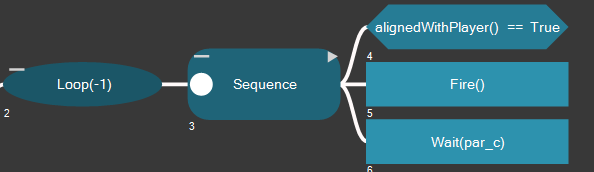
另一个例子
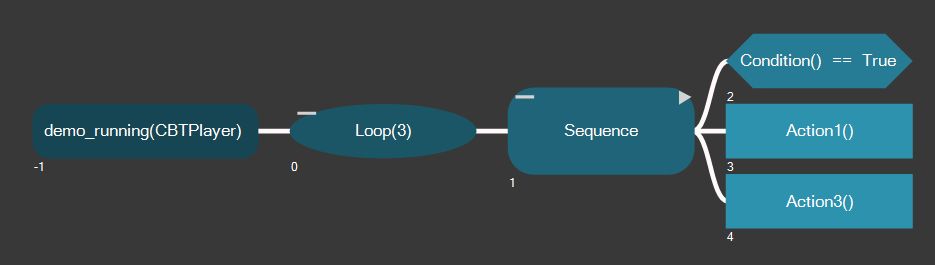
如上图,为了清晰说明运行状态,来看另一个例子。在这个例子中,Condition,Action1,Action3是3个函数。
- 0号节点是个Loop节点,循环3次。
- 1号节点是个Sequence节点
- 2号节点模拟一个条件,直接返回成功。
- 3号节点Action1是一个动作,直接返回成功。
- 4号节点Action3同样是一个动作,返回3次运行,然后返回成功。
其代码如下:
bool CBTPlayer::Condition()
{
m_Frames = 0;
cout << "\tCondition\n";
return true;
}
behaviac::EBTStatus CBTPlayer::Action1()
{
cout << "\tAction1\n";
return behaviac::BT_SUCCESS;
}
behaviac::EBTStatus CBTPlayer::Action3()
{
cout << "\tAction3\n";
m_Frames++;
if (m_Frames == 3)
{
return behaviac::BT_SUCCESS;
}
return behaviac::BT_RUNNING;
}
而执行该BT树的C++代码如下:
int frames = 0;
behaviac::EBTStatus status = behaviac::BT_RUNNING;
while (status == behaviac::BT_RUNNING)
{
cout << \" frame " << ++frames << std::endl;
status = g_player->btexec();
//other codes
}
上面的执行行为树的代码就如同游戏更新部分。status = g_player->btexec()是在游戏的更新函数(update或tick)里,需要每帧调用。
特别的,对于运行状态,即使运行状态概念上讲是“阻塞”在节点,但是依然是每帧需要调用btexec,也就是说,其节点依然是每帧都在运行,只是下一帧是继续上一帧,从而表现的是运行状态,在其结束之前,其父节点不会把控制转移给其他后续节点。这里的“阻塞”并非真的被阻塞,并非后续的代码(上面的other codes部分)不会被执行。status = g_player->btexec()后面如果有代码,依然被执行。
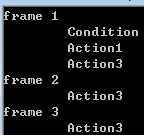
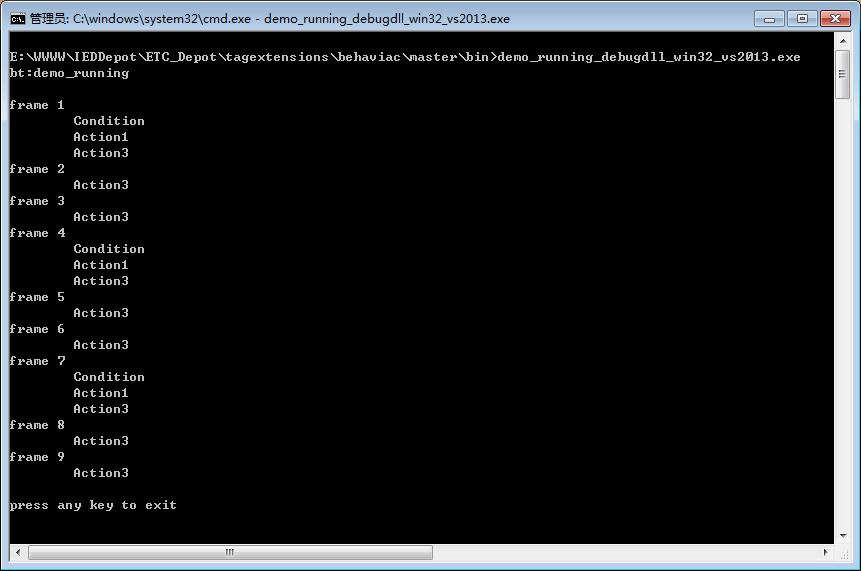
执行结果会是个什么样的输出呢?
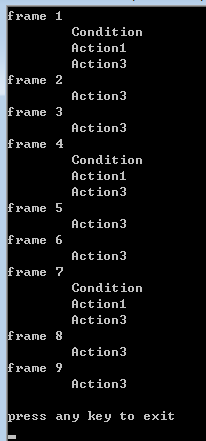
第1帧:
2号节点Condition返回“成功”,继续执行3号Action1节点,同样返回“成功”,接续执行4号Action3,返回“运行”。
第2帧:
由于上一帧4号Action3返回“运行”,直接继续执行4号Action3节点。
第3帧:
由于上一帧4号Action3返回“运行”,直接继续执行4号Action3节点。
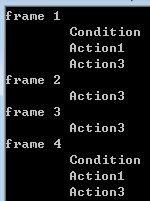
同样需要注意的是,2号Condition节点不再被执行。
而且,本次Action3返回“成功”,1号Sequence节点返回成功。0号Loop节点结束第1次迭代。
第4帧:
Loop的第2次迭代开始,就像第1帧的执行。
再进阶
又有聪明的读者要问了,持续返回“运行”状态的节点固然优化了执行,但其结果就像“阻塞”了BT的执行一样,如果发生了其他“重要”的事情需要处理怎么办?
在behaviac里至少有多种办法。
使用前置
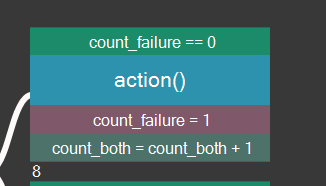
每个节点都可以添加前置附件或后置附件。
上图的action节点添加了一个前置,两个后置。
可以添加前置附件,并且“执行时机”设为Update或Both,则在每次执行之前都会先执行前置里配置的条件。
使用Parallel节点
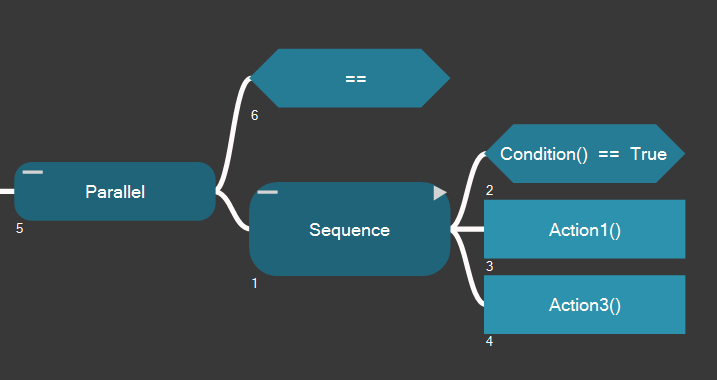
如上图,可以使用Parallel节点来“一边检查条件,一边执行动作”,该条件作为该动作的“Guard”条件。当该条件失败的时候来结束该处于持续运行状态的动作节点。
使用SelectorMonitor节点
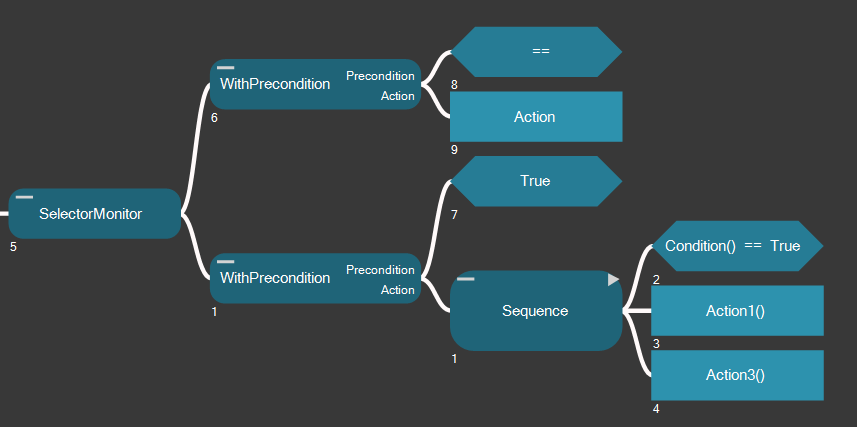
- SelectorMonitor是一个动态的选择节点,和Selector相同的是,它选择第一个success的节点,但不同的是,它不是只选择一次,而是每次执行的时候都对其子节点进行选择。如上图所示,假若它选择了下面有True条件的那个节点(节点7)并且下面的1号Sequence节点在运行状态,下一次它执行的时候,它依然会去检查上面的那个8号条件的子树,如果该条件为真,则终止下面的运行节点而执行9号节点。
- WithPrecondition有precondition子树和action子树。只有precondition子树返回success的时候,action子树才能够被执行。
使用Event子树
任何一个BT都可以作为事件子树,作为event附加到任何的一个节点上(用鼠标拖动BT到节点)。当运行该BT的时候,如果发生了某个事件,可以通过Agent::FireEvent来触发该事件,则处于running状态的节点,从下到上都有机会检查是否需要响应该事件,如果有该事件配置,则相应的事件子树就会被触发。请参考behaviac的相关文档获取详细信息。
总结
行为树的基本概念:
- 执行每个节点都会有一个结果(成功,失败或运行)
- 子节点的执行结果由其父节点控制和管理
- 返回运行结果的节点被视作处于运行状态,处于运行状态的节点将被持续执行一直到其返回结束(成功或失败)。在其结束前,其父节点不会把控制转移到后续节点。
其中理解运行状态是理解行为树的关键,也是使用好行为树的关键。
其他
上文另一个例子中“demo_running”的例子在安装包及源码里都有提供。最好查看源码,编译运行,自行尝试体会。
可以查看目录说明
请指定demo_running作为参数或不指定任何参数运行demo_running:
第一个例子的行为一开始没太看懂,后来用魂斗罗第一关的银色小炮台的AI套了一下,立马明白了