
简介
behaviac组件不仅支持行为树,也支持有限状态机(FSM),并且支持行为树跟状态机的相互嵌套调用。
behaviac组件中的状态机主要用到了状态(State)、等待状态(WaitState)和等待帧数状态(WaitFramesState)三种节点,以及条件转换(Transition)和总是转换(AlwaysTransition)两种附件,如下图所示:
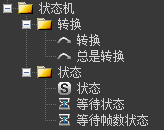
图1 状态机相关节点和附件
状态节点
状态节点(State)是状态机中的基本组成部分之一,可以在状态节点上添加前置、后置以及转换等附件,如下图所示:
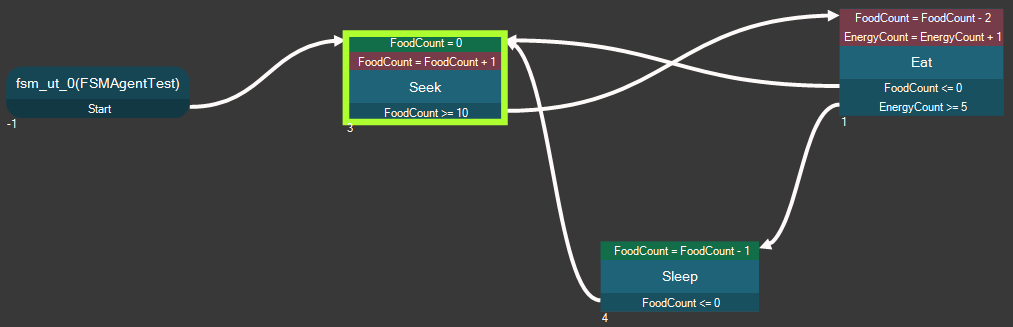
图2 状态节点
- 在状态节点上添加的前置:表明进入该状态节点时,需要执行的操作。
- 在状态节点上添加的后置:表明退出该状态节点时,需要执行的操作。
- 在状态节点上添加的转换:表明满足该转换所表示的条件时,由当前状态切换到转换所指向的下一个状态。
如下图所示,可以编辑状态节点的相关属性:
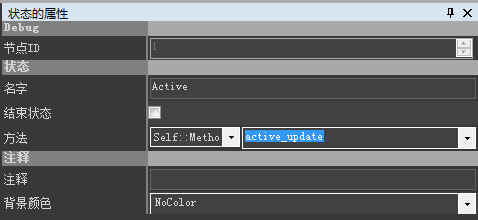
图3 状态节点的属性
- 名字:为状态节点指定一个有意义的名字,以便区分其他状态节点。
- 方法:表示该状态节点需要执行的操作。
- 结束状态:如果勾选,表示该状态作为结束状态,即在执行完该状态节点之后,整个状态机也直接结束。该节点形状也将显示为RoundRectangle,以示区别。
具体的执行逻辑可以查看fsm/fsmstate.cpp
等待状态节点
等待状态节点(WaitState)是一种特殊的状态节点,可以在状态节点上添加前置、后置以及等待转换等附件,如下图所示:
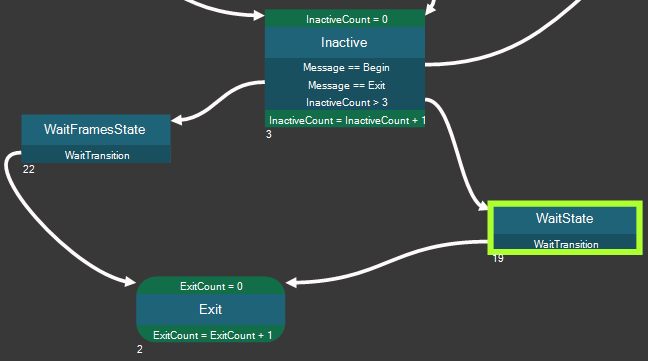
图4 等待状态节点
添加等待状态节点时,会自动的生成唯一的等待转换附件,不接受添加其他类型的转换附件。
如下图所示,可以编辑等待状态节点的相关属性:
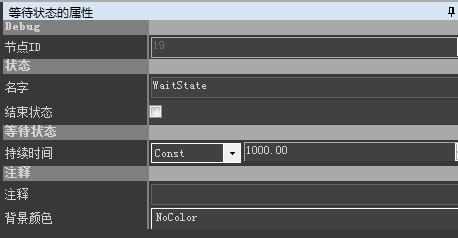
图5 等待状态节点的属性
相比状态节点的属性,等待状态节点少了“方法”属性,但多出了一个“持续时间”属性,用来指定需要等待多长时间,可以是常数、属性或方法的返回值。
具体的执行逻辑可以查看fsm/waitstate.cpp
等待帧数状态节点
等待帧数状态节点(WaitFramesState)也是一种特殊的状态节点,可以在状态节点上添加前置、后置以及等待转换等附件,如下图所示:
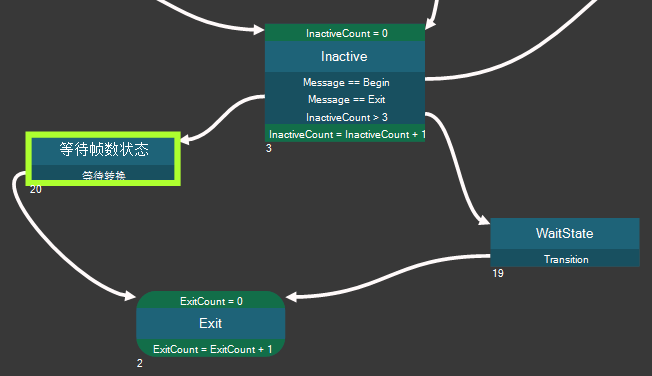
图6 等待帧数状态节点
添加等待帧数状态节点时,会自动的生成唯一的等待转换附件,不接受添加其他类型的转换附件。
如下图所示,可以编辑等待帧数状态节点的相关属性:
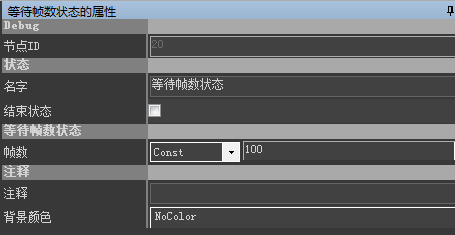
图7 等待帧数状态节点的属性
相比状态节点的属性,等待帧数状态节点少了“方法”属性,但多出了一个“帧数”属性,用来指定需要等待多少帧数,可以是常数、属性或方法的返回值。
具体的执行逻辑可以查看fsm/waitframesstate.cpp
条件转换附件
转换附件(Transition)是状态机中的基本组成部分之一,它表示一个条件,当这个条件满足时,由所在的状态切换到另一个状态,如下图所示:
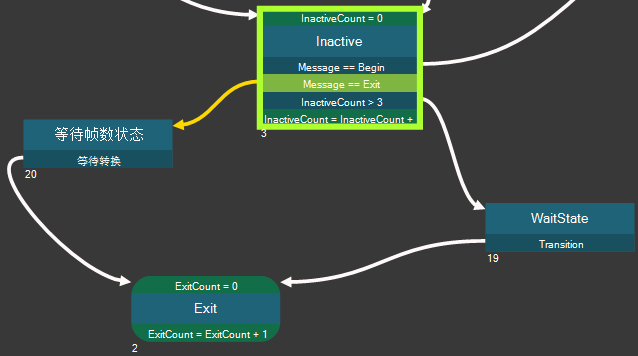
图8 转换附件
如下图所示,类似条件节点来编辑转换附件的相关属性:
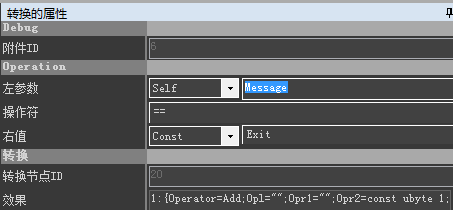
图9 转换附件的属性
此外,在上图中有个“效果”的属性,是转换附件执行完之后需要执行的额外操作。
具体的执行逻辑可以查看fsm/startcondition.cpp
状态转换附件
状态转换附件(StatusTransition)是一种特殊的转换附件,根据它的配置,转换时机会有不同:
- 总跳转,表示无条件从所在的状态切换到另一个状态,如下图所示
- 成功时,表示当所在节点是子树并且成功的时候转换
- 失败时,表示当所在节点是子树并且失败的时候转换
- 结束时,表示当所在节点是子树并且结束(成功或失败)的时候转换
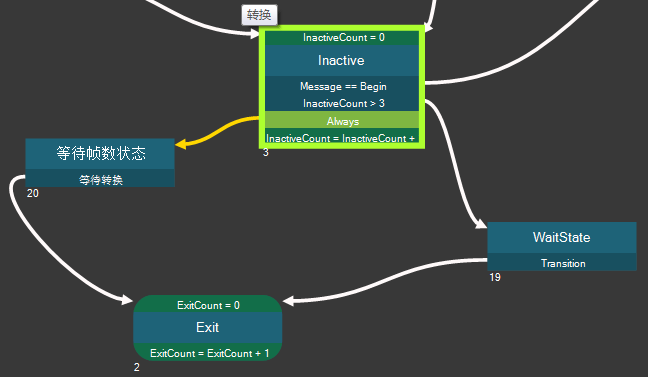
图10 状态转换附件
具体的执行逻辑可以查看fsm/alwaystransition.cpp